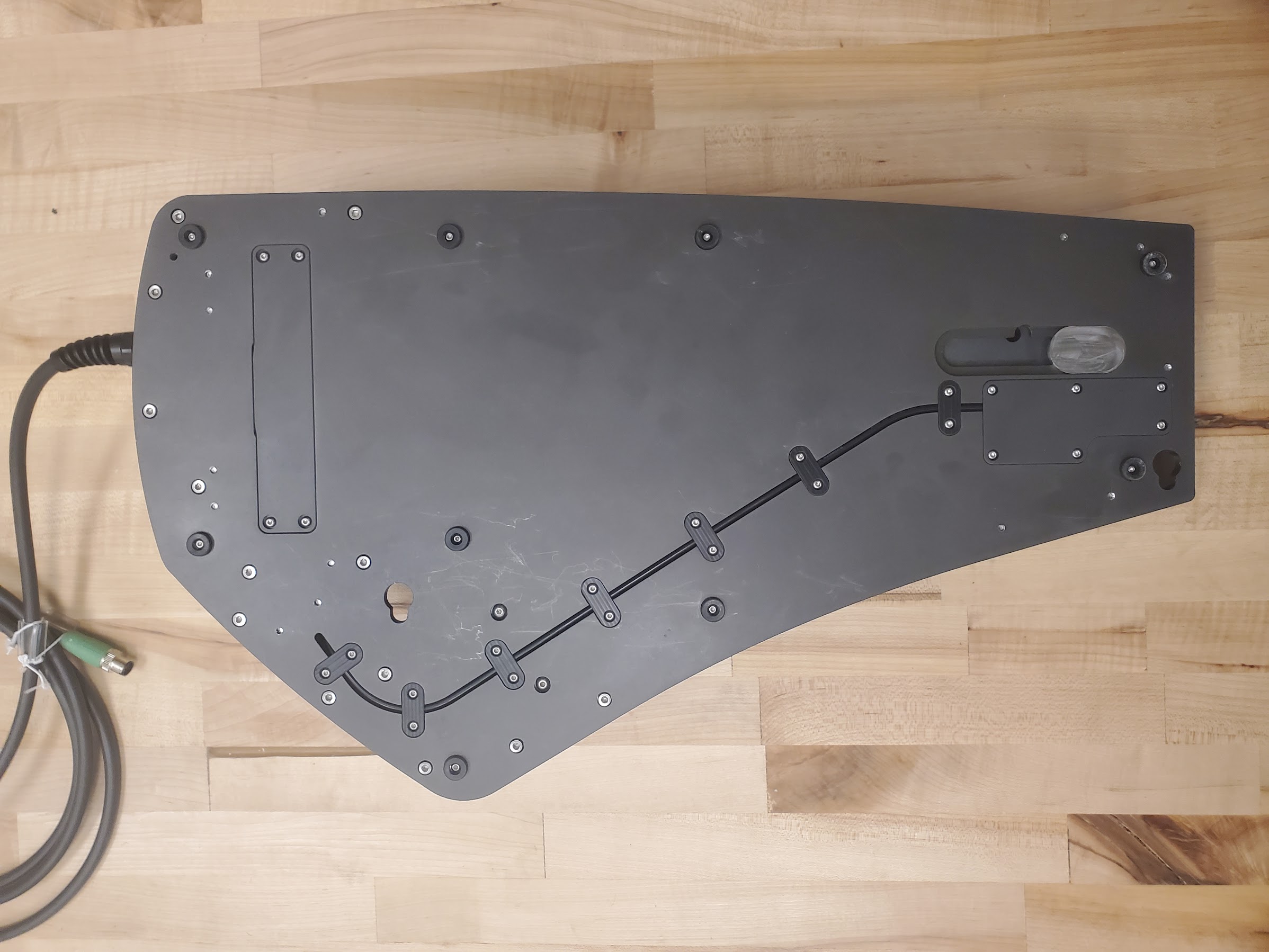
As part of a larger program, I led the design, fabrication, and assembly of a foot-operated robotic arm controller for the novel robotic surgery company Levita Magnetics. I worked through at least 15 prototypes before producing three controlled build units that successfully passed FDA compliance testing. These controllers afford the surgeon intuitive, three-DoF control of a pair of robotic arms while remaining comfortable to operate and stand on during a three hour laparoscopic surgical procedure.
Navigating the human factor
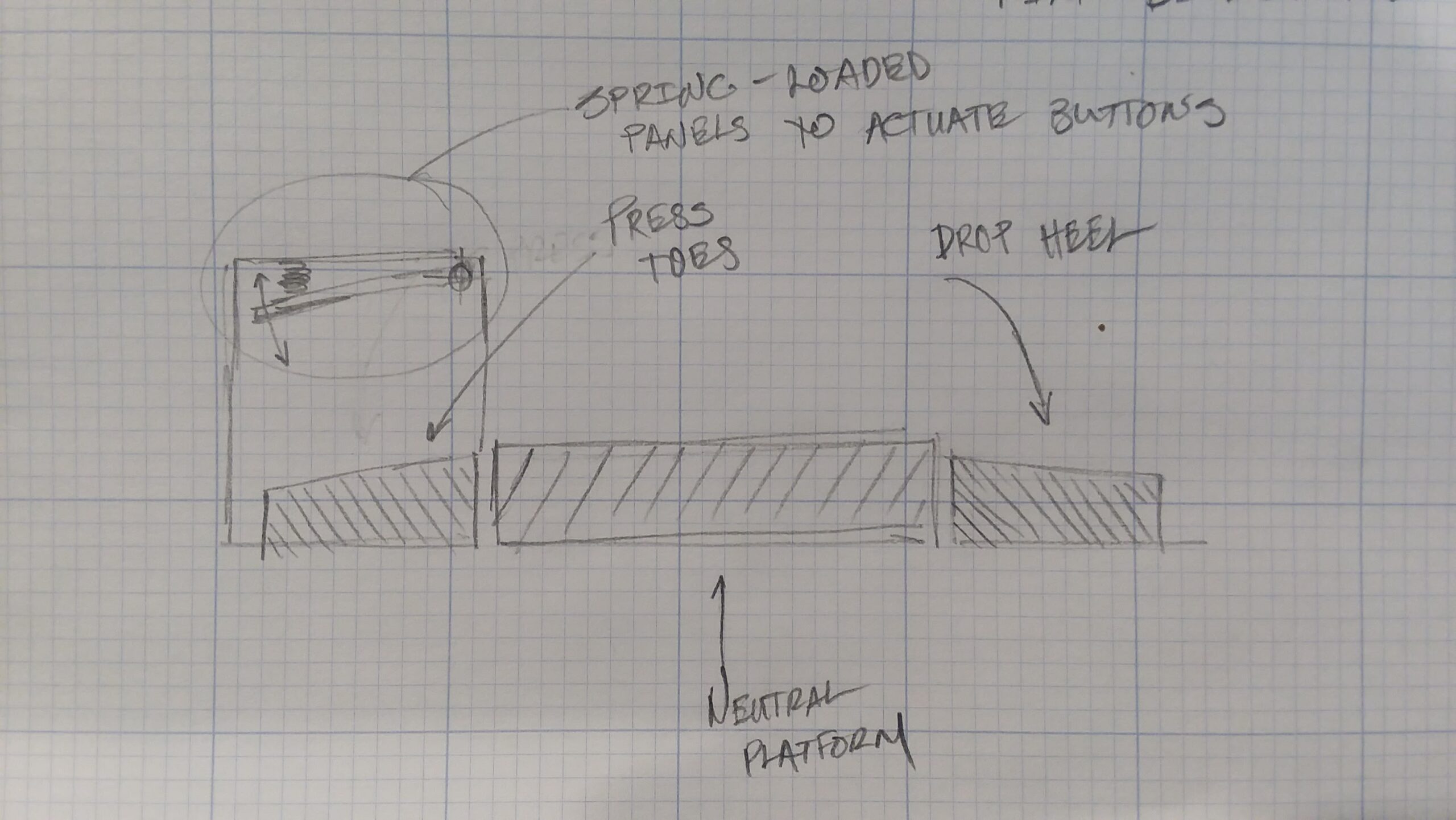
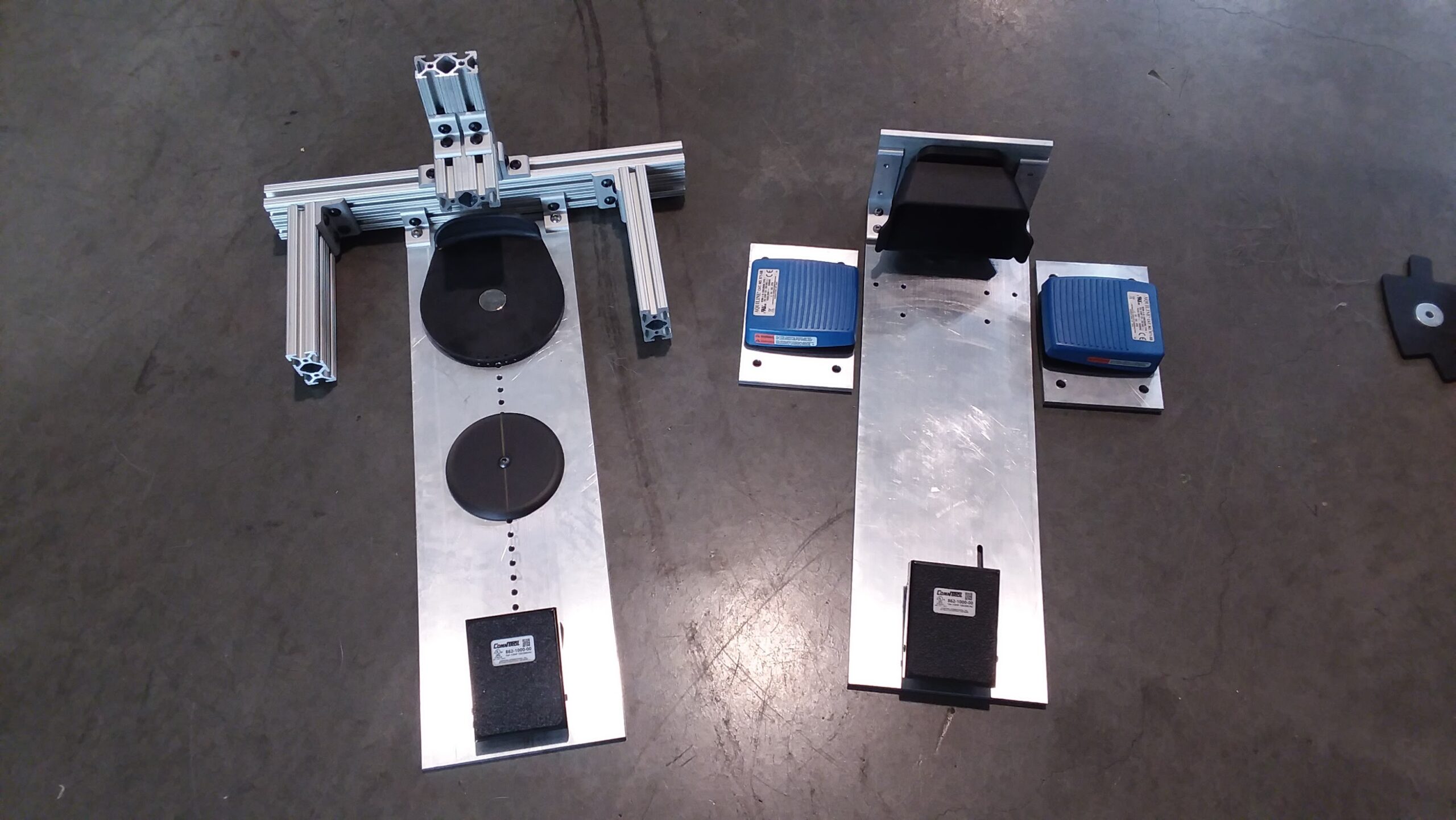
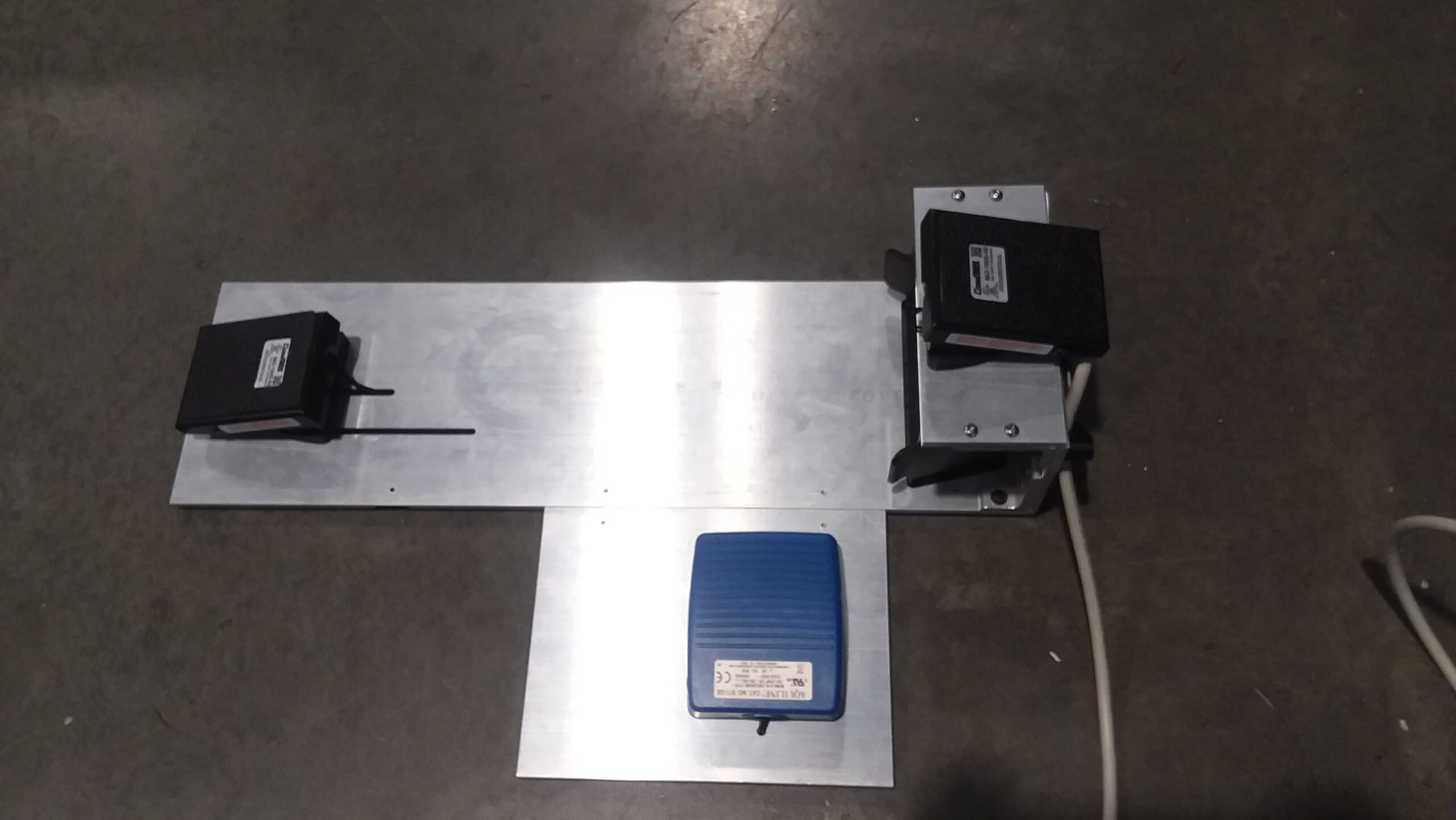
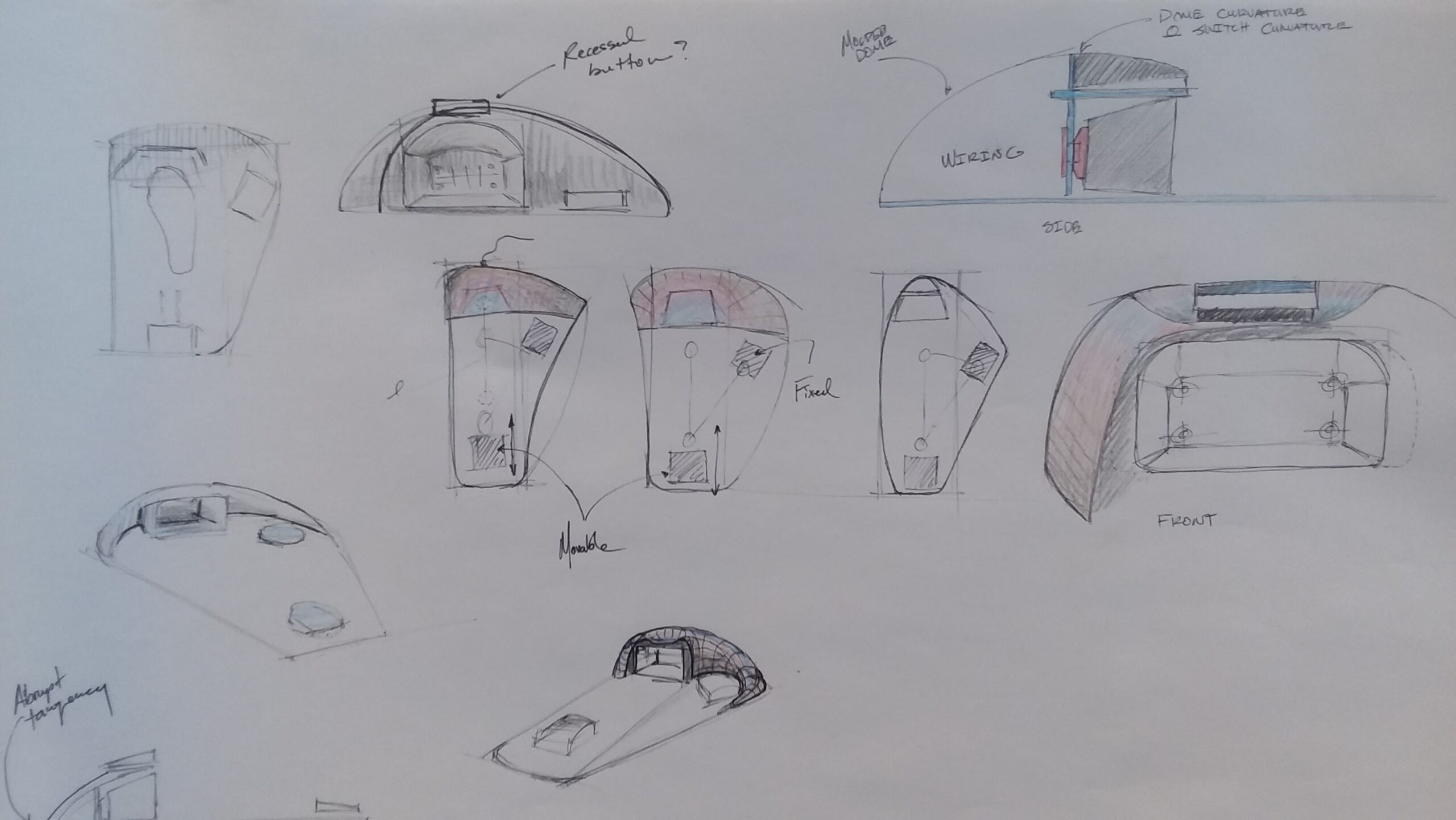
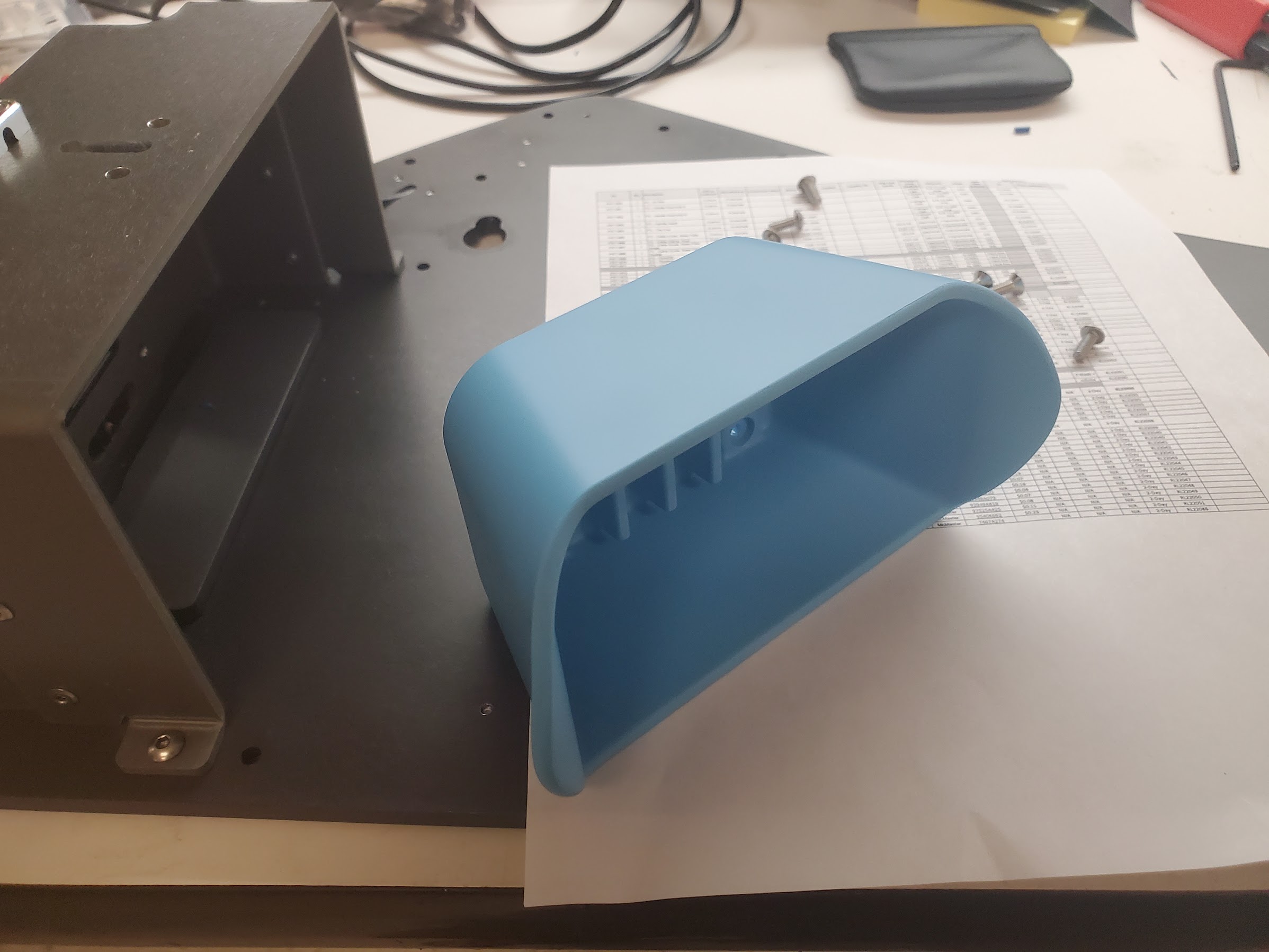
Designing the foot controller was an exercise in controls mapping, interpreting ergonomics studies, and ultra-low-profile packaging. I fabricated a slew of configurable prototypes to test out switch types and placement, foot size adjustability, foot motions, signifiers, affordances, and even haptic feedback – since these controllers were to be operated blind. These prototypes were passed around the office for testing and survey along with the infamous pair of Crocs, which simulated the bulky clogs common among surgeons.
Ergonomic Foot Control
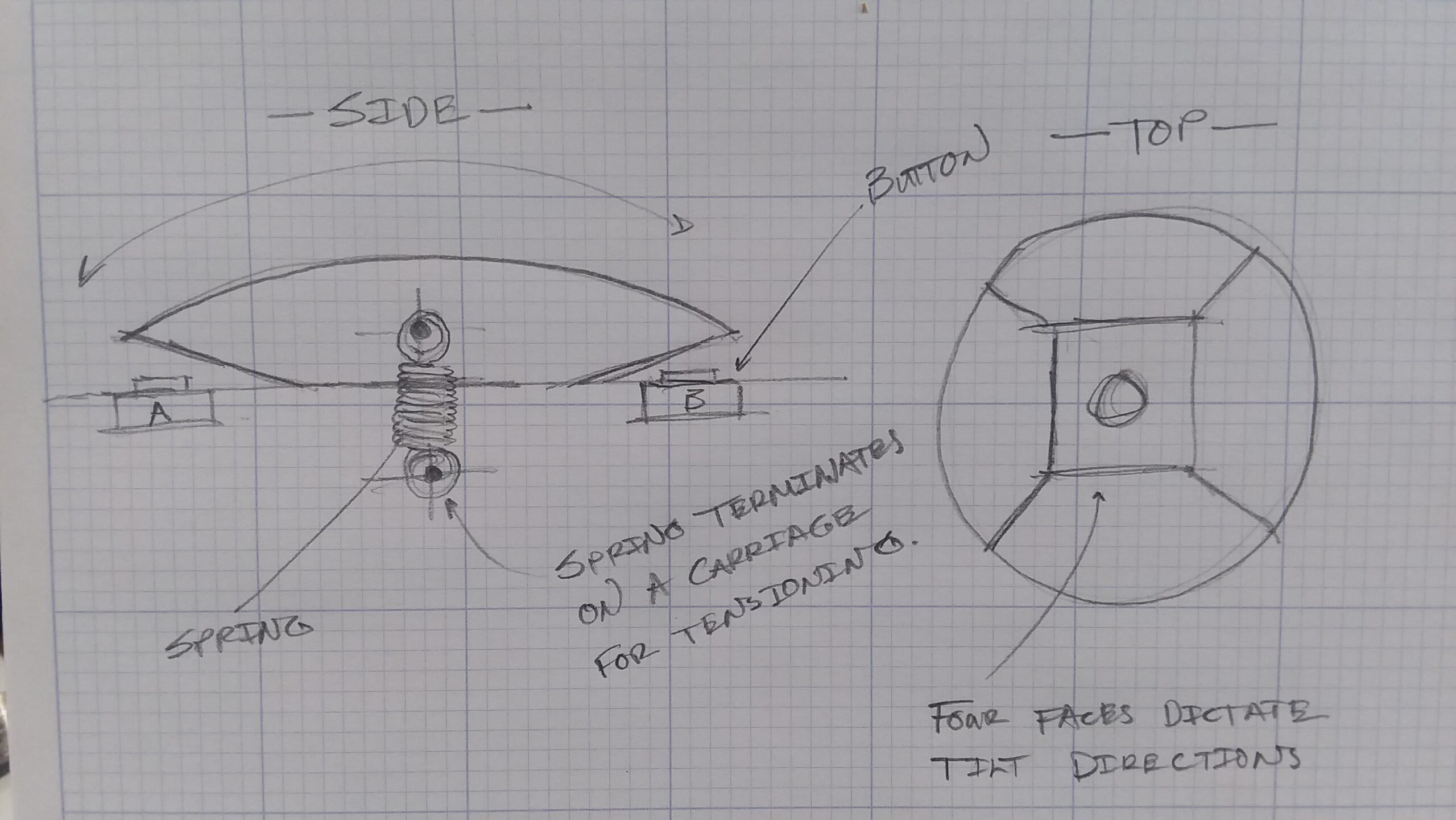
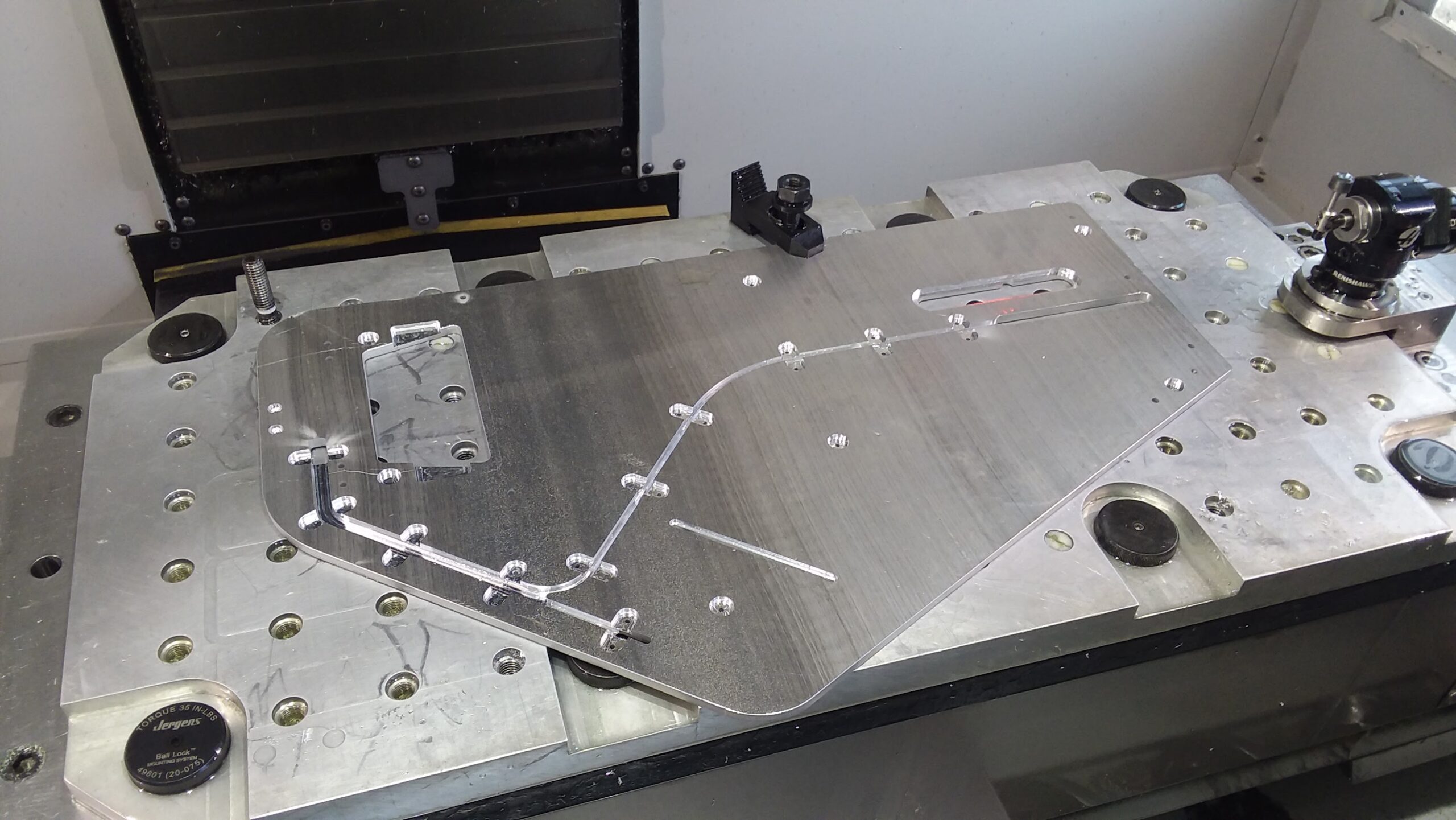
From sketches and guesses to complex surface modeled molded parts, custom PCBs, machined, sheet metal, and off-the-shelf components. Core to the success of the foot controller is a magnetically centered, rocker-axis toe cup providing primary robot control with minimal foot movements. A platform height of a mere 1/4″ offers a comfortable stance through the duration of the procedure.