From streamlining package handling to laparoscopic surgery
Exercises in mechanism design and CNC machining
Across very different fields and use cases, I have led the design of a robot wrist and quick-release coupler from requirements documents and sketches, to CAD model, 3D prints, then CNC machined products – and even on through FDA verification and validation testing. Born in the digital world with top-down modeling techniques, I pulled these designs into their final metal forms myself through the wonders, stress, and constant paranoia of 5-axis CNC machining.
The demands everyday life puts on the body become shockingly evident when we try to recreate our own joints.
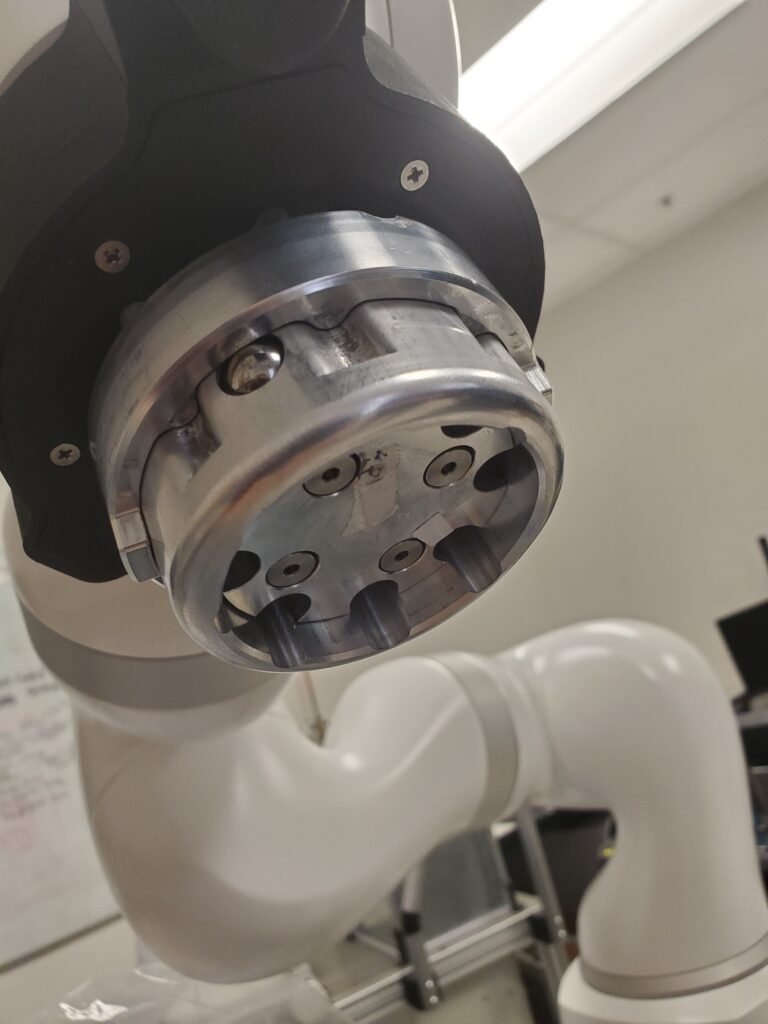
Dexterous package handling in tight spaces
Much like its human counterpart, a robot wrist is the final set of linkages between the forearm and the end effector. The linkage I designed is a type of virtual rolling contact joint capable of a continuous hemispherical sweep with zero singularities. I CNC machined each part in a single, 5-axis operation from 7075 aluminum for strength and low weight. Self-lubricating bushings and stainless hardware hold the assembly together.
Levita Magnetics is bringing minimally-invasive, magnetic-assisted robotic surgery to the world; I helped design the hardware that makes their mission possible.
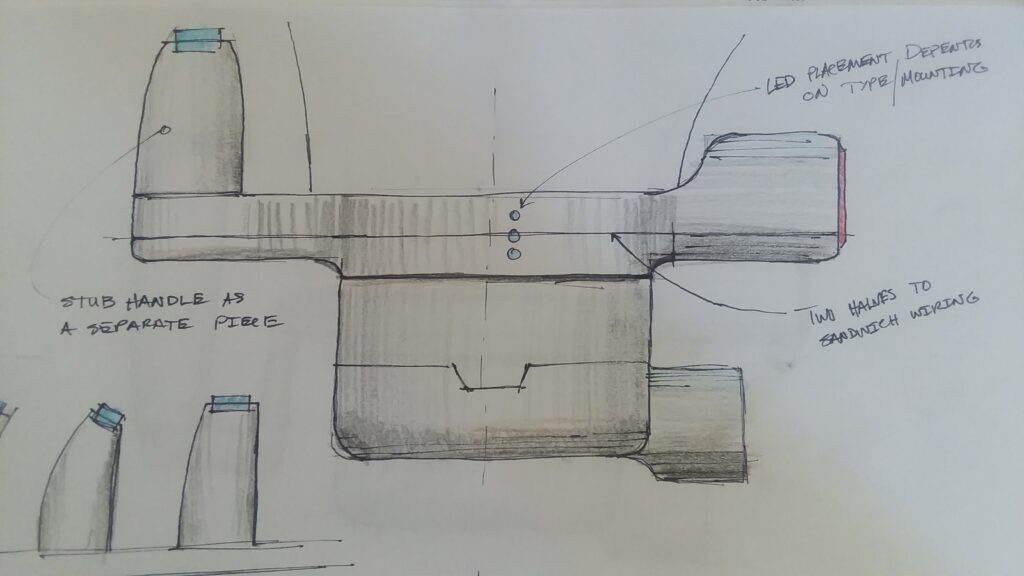
Secure connections across a sterile barrier
A regular challenge with robotic surgery systems is keeping the robot itself out of the sterile field. Inspired by quick-connect pneumatic fittings, I designed and machined a quick-release coupler that makes a secure connection between robot and laparoscope while preserving the integrity of a protective drape. Beginning with mechanism and ID sketches and progressing through SLA printed models to aluminum functional prototypes, the final units cleared by the FDA were cut from 316 stainless – with myriad machining learnings along the way.